
❮
❯
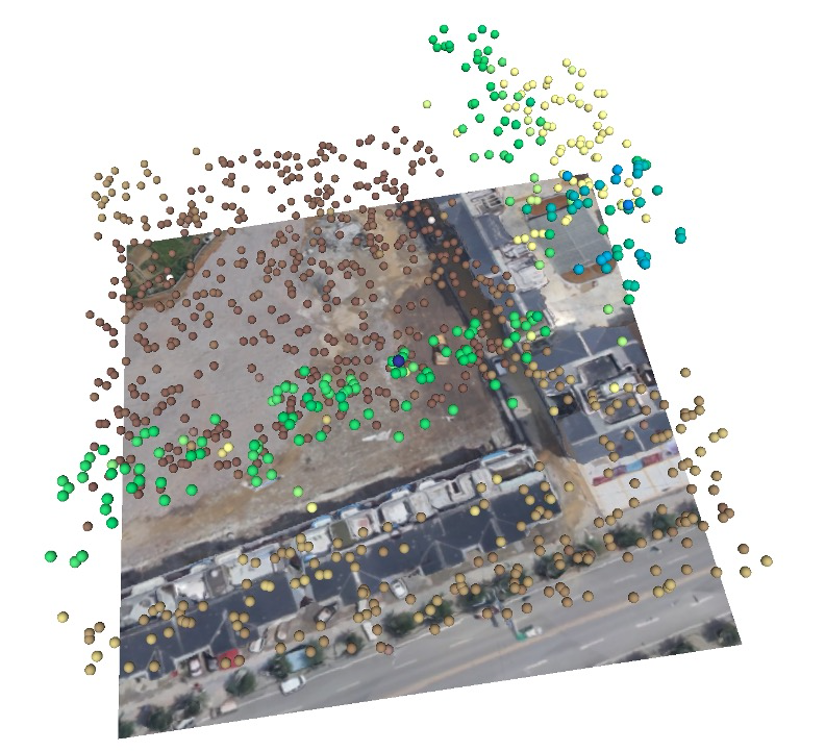
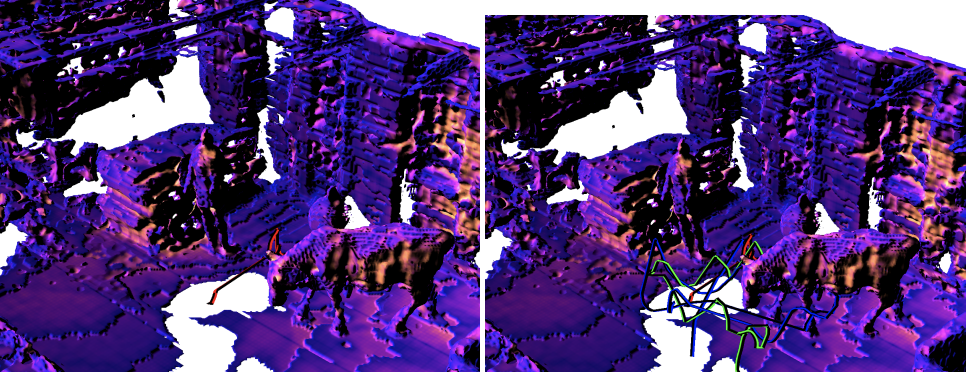
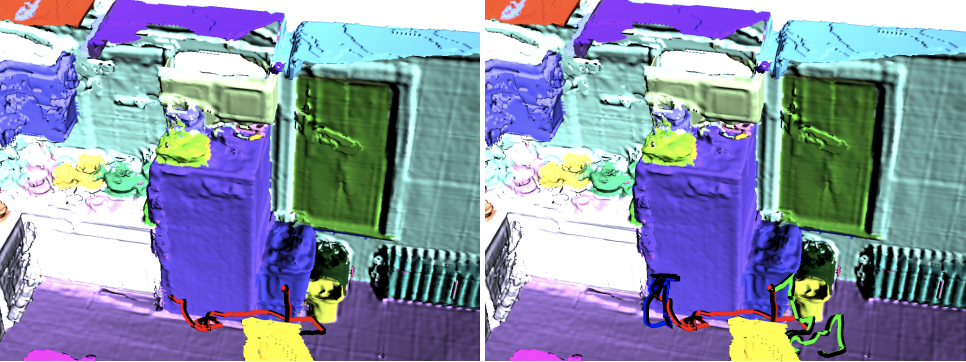
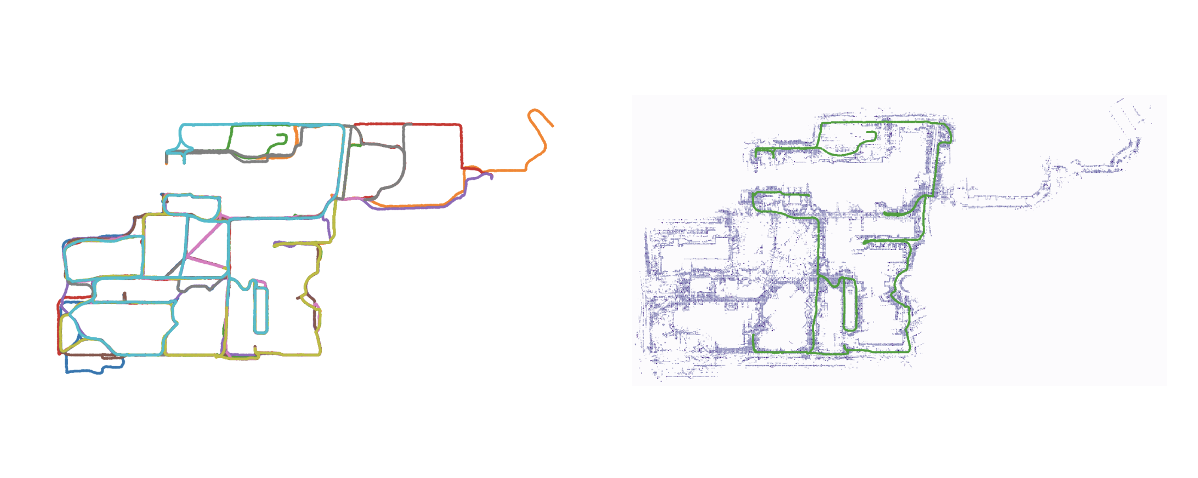
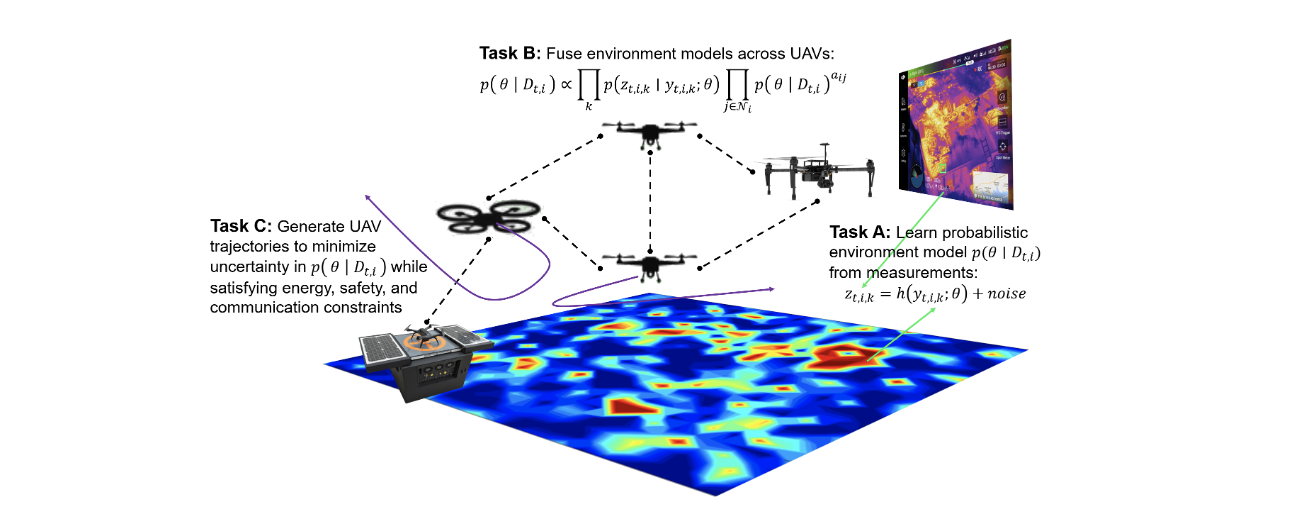
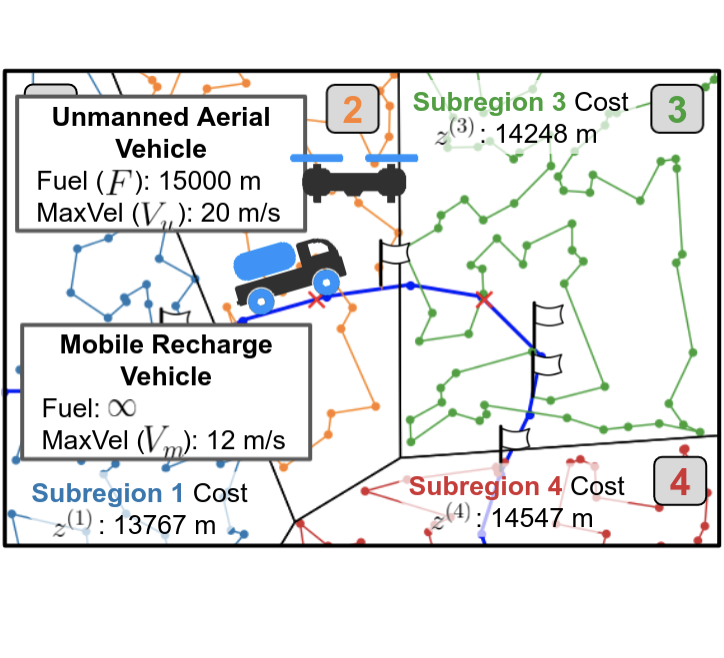
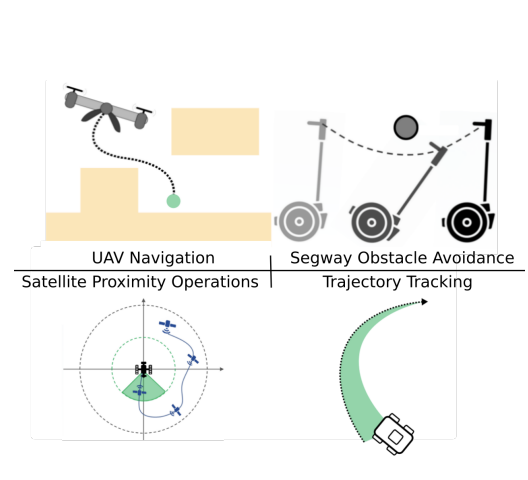
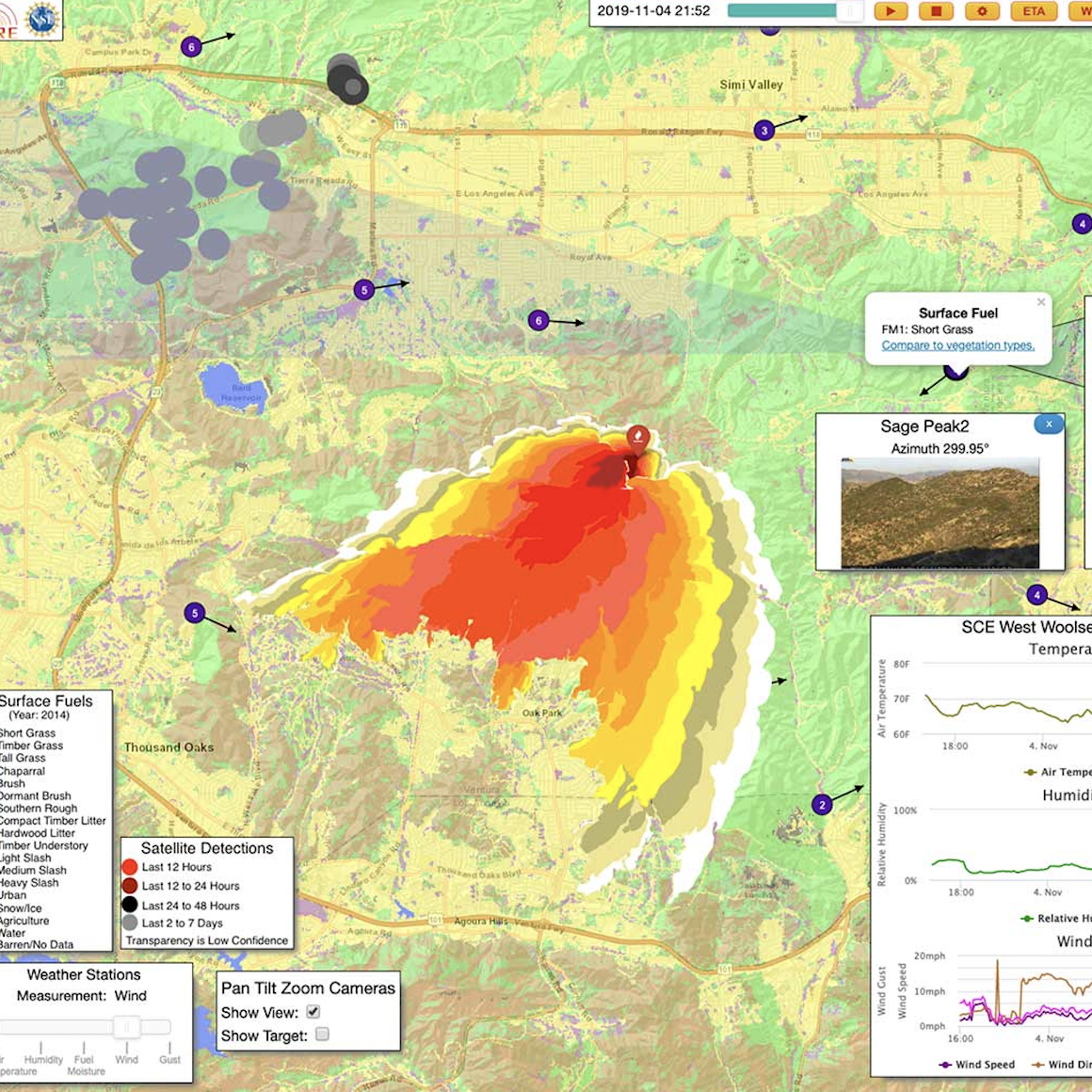
This project aims to take advantage of the hyperconvergence of computation, storage, sensing, and communication in small unmanned aerial vehicles (UAVs) to realize large-scale mapping of environmental factors such as temperature, vegetation, pressure, and chemical concentration that contribute to fire initiation. Developing UAV teams that recharge autonomously and communicate intermittently among each other and with static sensors will aid firefighters with continuous real-time surveillance and early detection of ensuing fires. First, a new Satisfiability Modulo Optimal Control framework is proposed to handle mixed continuous flight dynamics and discrete constraints and ensure collision avoidance, persistent communication, and autonomous recharging for UAV navigation. Second, a distributed systems architecture using new uncertainty-weighted models will be developed to enable cooperative mapping across a heterogeneous team of UAVs and static sensors and avoid bandwidth-intensive data streaming. Lastly, a new Bayesian learning and inference approach is proposed to generate multi-modal (e.g., thermal, semantic, geometric, chemical) maps of real-time environmental conditions with adaptive accuracy and uncertainty quantification.
This project focuses on three fundamental innovations to address the scientific challenges associated with autonomous, collaborative environmental monitoring.
October 2018 - December 2021
Our project was featured in the UC San Diego News! Check it [here].

We held an HKN x IEEE Guest Lecture at UCSD and SDSU Chapters on "Terrain Mapping and Safe Control of Aerial Robots for Wildfire Detection".
Guest lecture "Autonomous Control of Aerial Robots for Environmental Monitoring" at the IEEE student branch at The College of New Jersey (TCNJ).

Guest lecture "Autonomous Control of Aerial Robots for Environmental Monitoring" at the IEEE RAS/CS/IAS Connecticut chapter [link].
In collaboration with UCSD’s HKN chapter and SDSU’s IEEE chapter, we held four tutorials on mapping, motion planning, optimization, and machine learning targeting undergraduate students. Materials are available [here].